
-
- Downloads
Initial commit
parents
Branches
No related tags found
Showing
- .ipynb_checkpoints/Untitled-checkpoint.ipynb 115 additions, 0 deletions.ipynb_checkpoints/Untitled-checkpoint.ipynb
- .jupyter/desktop-workspaces/default-37a8.jupyterlab-workspace 2 additions, 0 deletions...yter/desktop-workspaces/default-37a8.jupyterlab-workspace
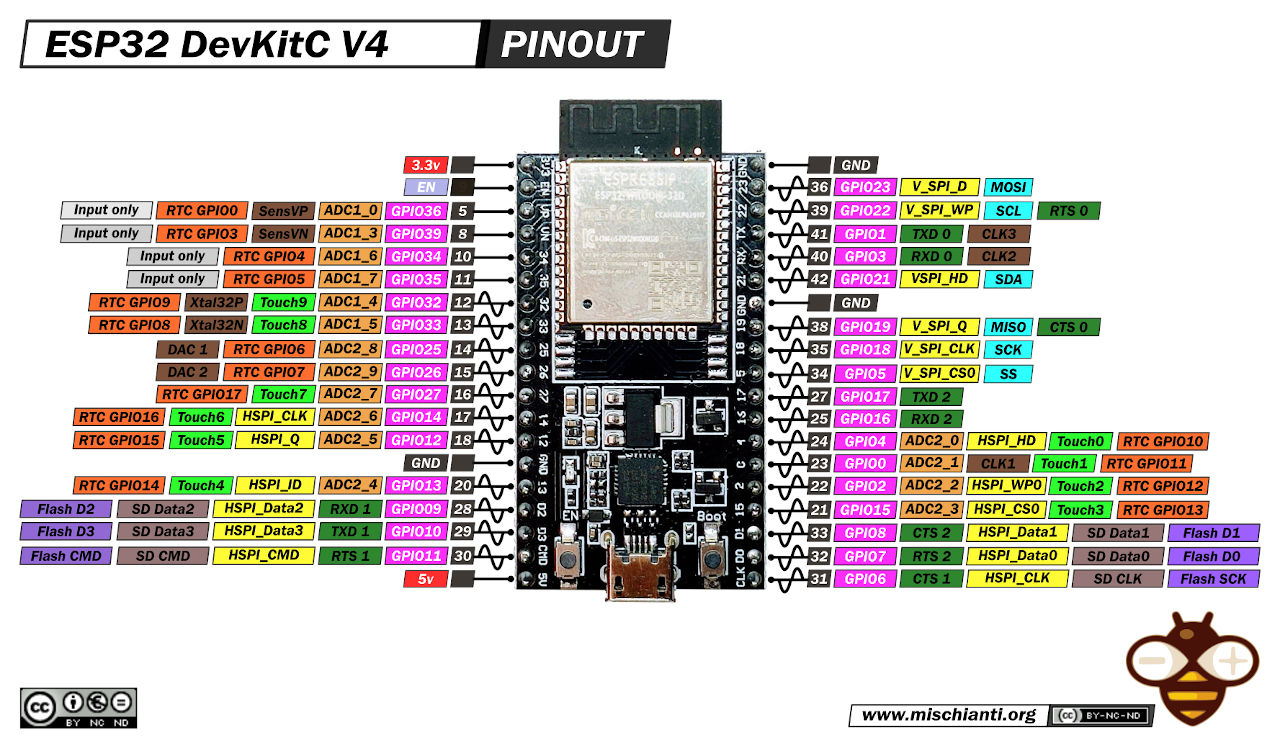
- ESP32-DEV-KIT-DevKitC-v4-pinout-mischianti.jpg 0 additions, 0 deletionsESP32-DEV-KIT-DevKitC-v4-pinout-mischianti.jpg
- README.md 0 additions, 0 deletionsREADME.md
- data-processing.ipynb 115 additions, 0 deletionsdata-processing.ipynb
- data.h 0 additions, 0 deletionsdata.h
- data/open-meteo-53.53N9.98E11m (3) (2).csv 0 additions, 0 deletionsdata/open-meteo-53.53N9.98E11m (3) (2).csv
- precipitationctl.ino 41 additions, 0 deletionsprecipitationctl.ino
.ipynb_checkpoints/Untitled-checkpoint.ipynb
0 → 100644
{kind=link}
248 KiB
README.md
0 → 100644
data-processing.ipynb
0 → 100644
data.h
0 → 100644
This diff is collapsed.
data/open-meteo-53.53N9.98E11m (3) (2).csv
0 → 100644
This diff is collapsed.
precipitationctl.ino
0 → 100644